

Đào tạo chuyên nghiệp trong môi trường học tập mô phỏng ảo
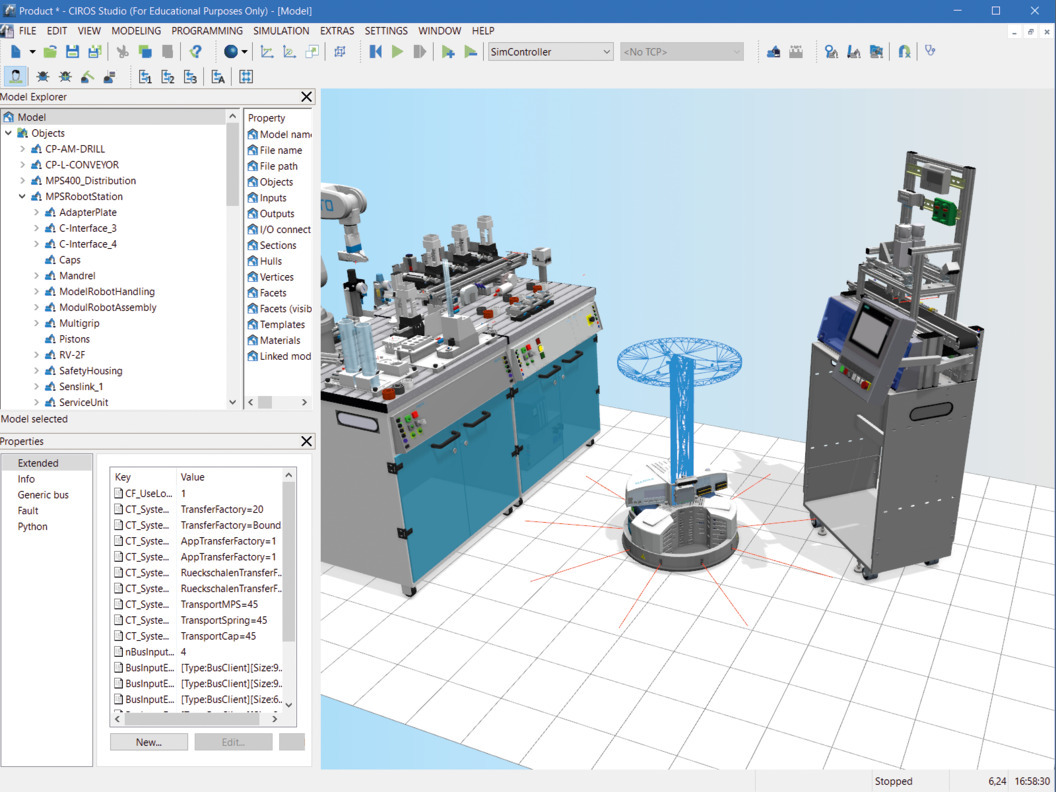
CIROS là nền tảng cực kỳ mạnh mẽ đã được chứng minh trong ngành để tạo và ứng dụng các mô hình mô phỏng 3D cho công nghệ tự động hóa. Được tăng cường với các cơ chế và vật liệu mang tính giáo dục, CIROS có thể được sử dụng theo nhiều cách khác nhau trong môi trường học tập. Cho dù là mô hình chế tạo sẵn, giao diện công nghiệp với rô-bốt và bộ điều khiển hay nghiên cứu với các phương pháp tiếp cận thông qua Python.
Thông tin thêm
CIROS kết hợp các chức năng sau trong một giao diện chung:
– Mô phỏng 3D theo thời gian rời rạc với các cơ chế mô hình hóa
– Bộ lọc nhập CAD cho STEP, IGES, STL, VRML, Collada và bộ lọc xuất cho các định dạng phổ biến
– Xây dựng hệ thống và dây chuyền sản xuất dựa trên thư viện mô hình và mô-đun ứng dụng
– Truy cập vào hơn 1100 mô hình rô-bốt được bao gồm
– Lập trình rô-bốt bằng các ngôn ngữ lập trình sau, trong số những ngôn ngữ khác: Ngôn ngữ rô-bốt công nghiệp (IRL), Mitsubishi MELFA BASIC V, Ngôn ngữ rô-bốt Kuka (KRL), ABB Rapid
– Kết nối với Hệ thống thực thi sản xuất MES4 để vận hành các nhà máy học tập như một bản sao kỹ thuật số mang tính giáo dục.
– Con người ảo với 30 bậc tự do độc lập
Thư viện mô hình mở rộng bao gồm:
– Mô hình dành cho người mới bắt đầu để giới thiệu các chủ đề cơ bản
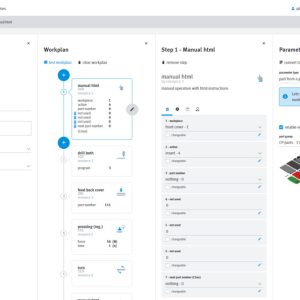
– Tài liệu khóa học tiếp theo trong Festo LX (yêu cầu đăng ký miễn phí)
– Hình ảnh ảo của các hệ thống học tập Festo Didactic như MPS và Robotino để chuyển hiệu suất học tập giữa các thiết bị mô phỏng và thiết bị vật lý
– Các ví dụ được chuẩn bị cho các giao diện công nghiệp như PLC SIM Advanced
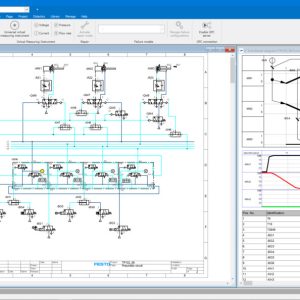
– Mô hình được điều khiển thông qua bộ điều khiển PLC STEP7 tích hợp, sử dụng các trình thông dịch khác như IRL hoặc giao diện bên ngoài cho PLCSIM và PLCSIM Advanced
– Có thể kết nối với các giao diện dựa trên OPC khác như CODESYS bằng OPC UA hoặc EzOPC
– Sử dụng EasyPort, có thể sử dụng đồng thời tối đa bốn PLC phần cứng bên ngoài để điều khiển mô phỏng (phần cứng trong vòng lặp)
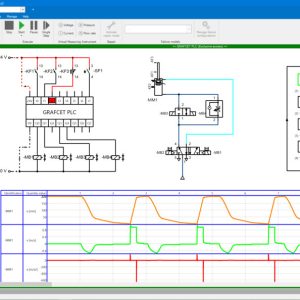
– Với sự trợ giúp của Matlab, Python và EtherCAT, có thể kết nối các bộ điều khiển mô phỏng bên ngoài và mô hình hóa hành vi của hệ thống.
– Ở chế độ mô phỏng lỗi với hành vi có thể mở rộng cho các thành phần, có thể tìm và loại bỏ lỗi. Kết quả học tập cho phép đào tạo hiệu quả để đưa vào vận hành và sửa chữa có hệ thống trong trường hợp xảy ra lỗi trong môi trường mô phỏng.
– Đường dẫn và chế độ camera mở rộng được cung cấp để chuẩn bị tối ưu kết quả từ các tác vụ và dự án, có thể xuất dưới dạng video hoặc vùng chứa HTML5 để hiển thị độc lập với thiết bị.
Đánh giá
Chưa có đánh giá nào.